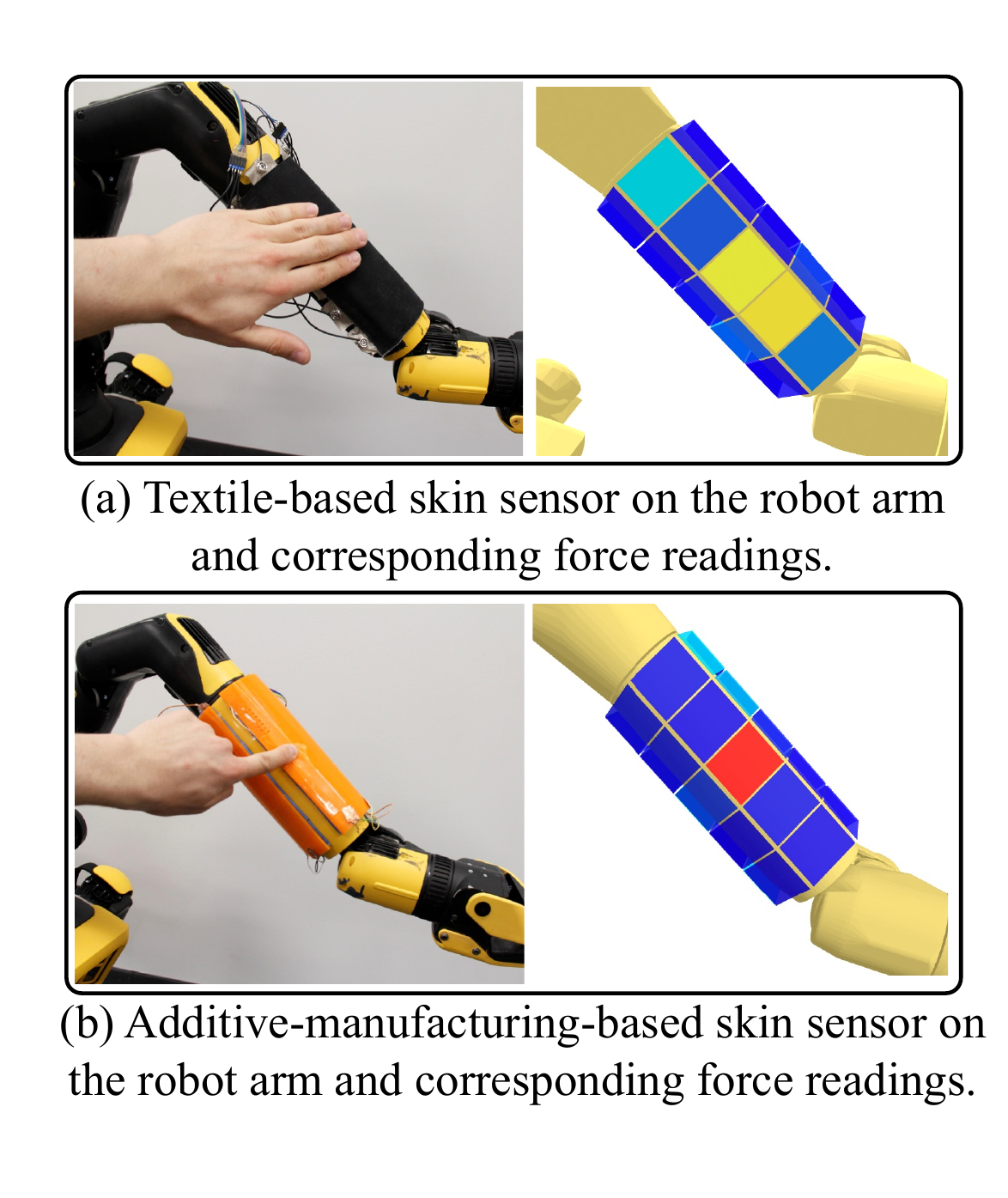
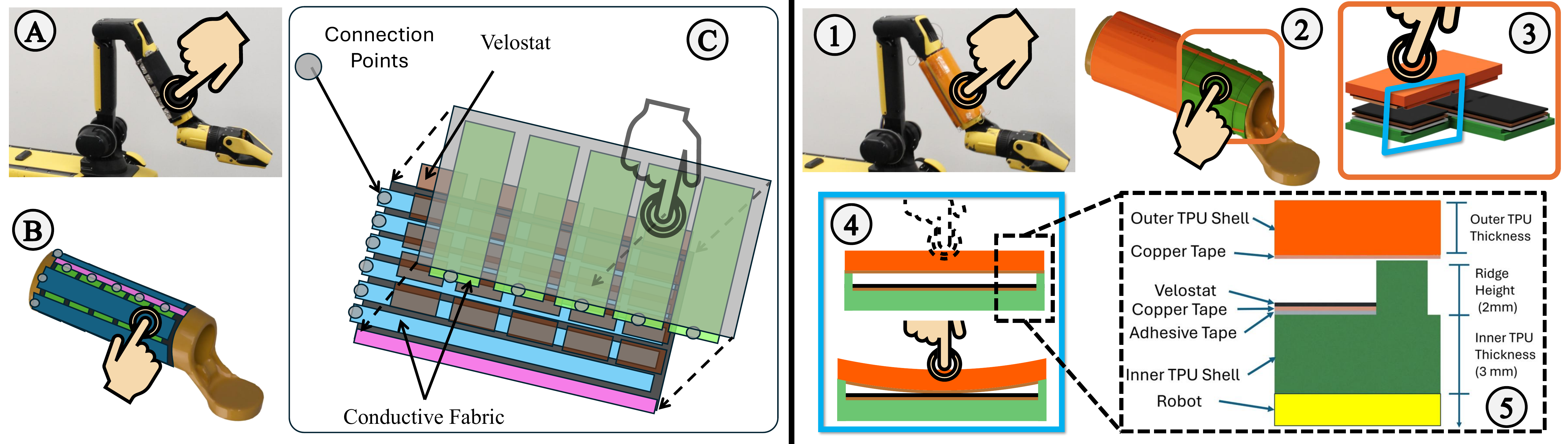
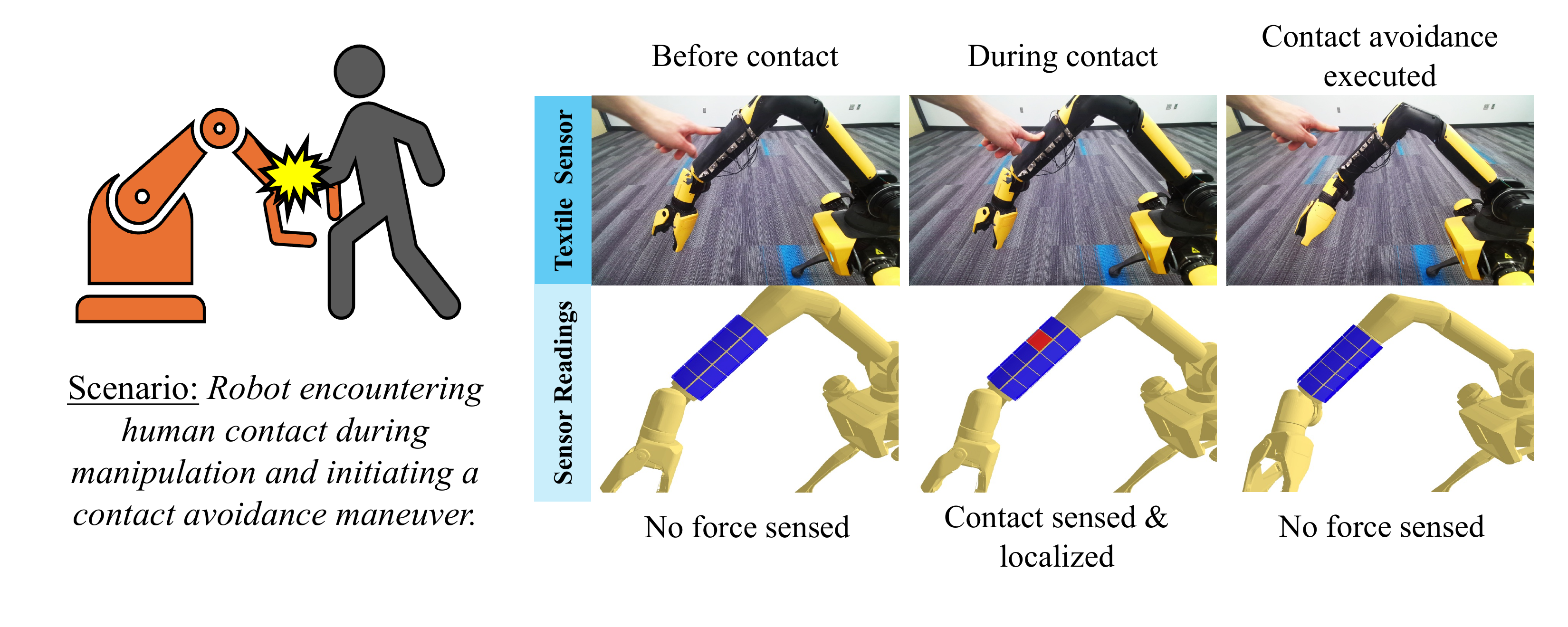
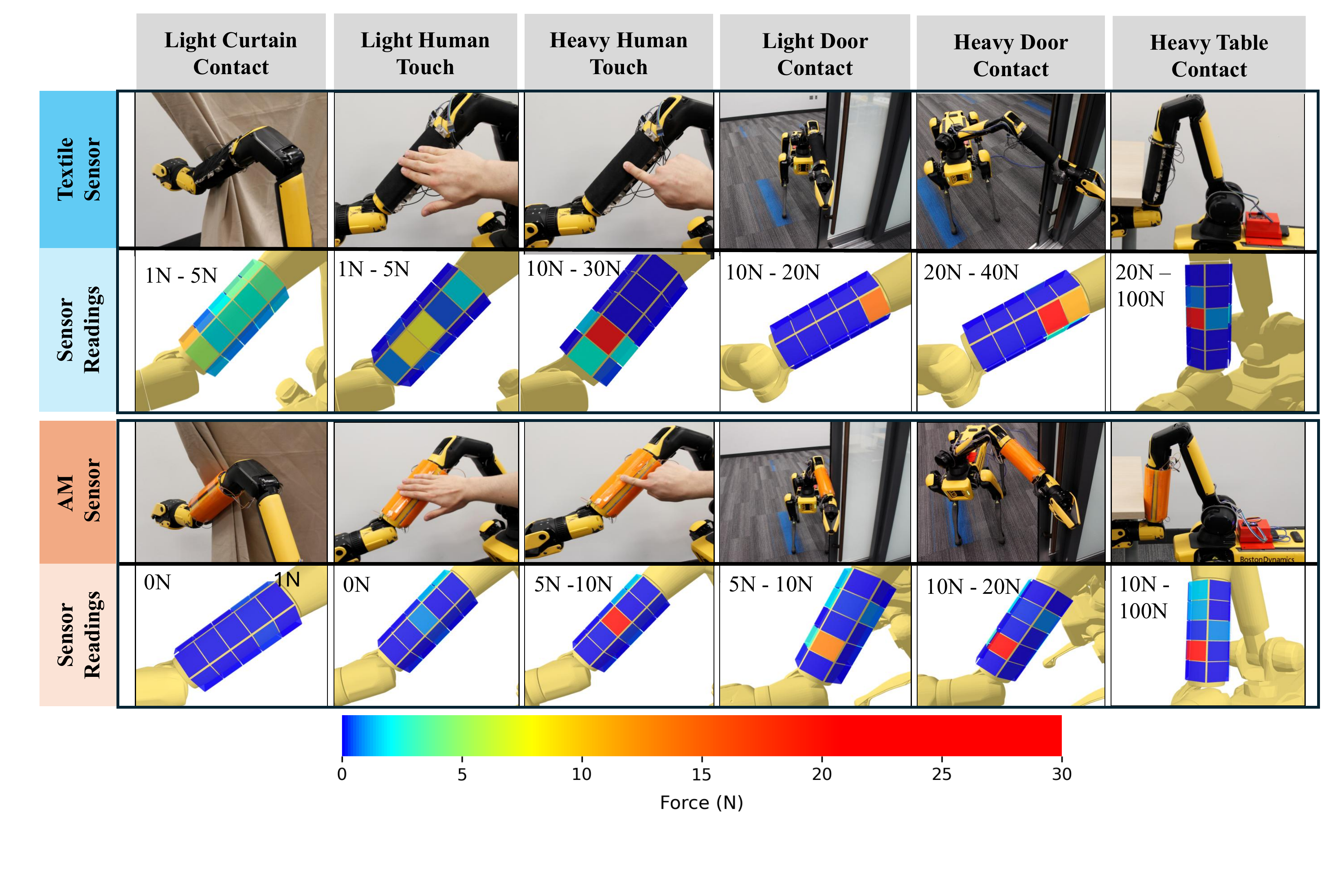
Robotic manipulation in human-centered and cluttered environments requires not only precise end-effector control but also the ability to sense and regulate contact forces across the entire arm. Restricting tactile sensing to the fingertips or gripper limits a robot's ability to detect, modulate, and safely respond to contact occurring along its links during motion. Whole-arm tactile sensing enables both contact avoidance and deliberate contact exploitation, yet practical tactile skins remain difficult to realize due to trade-offs between fabrication cost, surface coverage, sensing density, usable force range, and long-term repeatability. We present two complementary whole-arm tactile skin architectures that jointly address this trade-off: a textile-based design optimized for low-force sensitivity and contact avoidance, and a 3D-printed conformal shell design optimized for higher-force, durable contact embracing. Both designs use a resistive taxel matrix and cost under $10 per link. We provide fabrication guidelines, tunable design parameters, and quantitative characterization of force range, repeatability, and hysteresis. Experiments on a mobile manipulator demonstrate both contact avoidance and controlled contact-embracing behaviors in real-world tasks.
Abstract